
i brought home a Freenove tank robot kit, a raspberry pi 5, and the kind of optimism that usually disappears the moment you open the box. the parts came in tidy little bags, treads and wheels stacked neatly, and my hopes were high. except this one was going to argue with me in python instead of plastic.
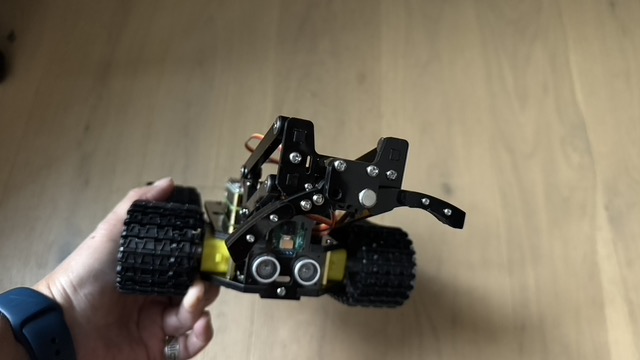
the build itself was straightforward: motors, acrylic plates, tiny screws that always seem to roll away at the worst moment. but this time i was prepared, i bought special trays, so the screws jumped out only once or twice but never very far. i slotted the pi on top like a brain waiting for its first thought. i love these little pis, they are super intelligent and easy to use. i assembled all the parts and that wasn’t so easy because the instructions can be obtuse and the video i found didn’t match the instructions. but after a while, the whole kit and caboodle was assembled. it has a little arm in the front to pick things up and a camera to snap fotos (that i have yet to get to work), an infrared line tracking module, an obstacle avoidance process to go with that, four leds that flash rainbows and all sorts of funny light shows, and an ultrasonic module that figures out when to stop before bumping into things. it’s quite sturdy. it runs on 18650 batteries that power the motors and servos, and also the pi.
after wrestling for a bit with the arm servo, i finally got it all set up (i gave up on the camera for now). when the server window finally opened and lines of code began to tick by, i felt that familiar spark: it’s aliiiiiiiiiive!
alive, but opinionated.
on my iphone the app swore it was connected. the server window on the pi cheerfully displayed information. yet when i tapped the controls, the tank sat still. worse, the ip address the server printed didn’t match the one my network showed. according to the robot, it lived at .234. according to my router, it lived at .235. i don’t know what kind of secret double life it’s trying to lead, but clearly it thinks it knows better than i do.
eventually i coaxed a little movement out of it, the kind of hesitant shuffle you see when a doggo isn’t sure if the floor is safe. enough to prove that the hardware works, not enough to call it obedient.
that’s where things stand: me, the hopeful builder, and a small robot with a stubborn streak. it’s not failure, it’s training. every quirk teaches me something, about networking, about patience, about how machines develop personalities whether we want them to or not.
next up: i’ll onboard some sort of ai for kicks, and i’ll try mounting a backpack of sensors to see if it accepts new tricks. or maybe it’ll ignore me again. honestly, i wouldn’t be surprised.

Leave a comment